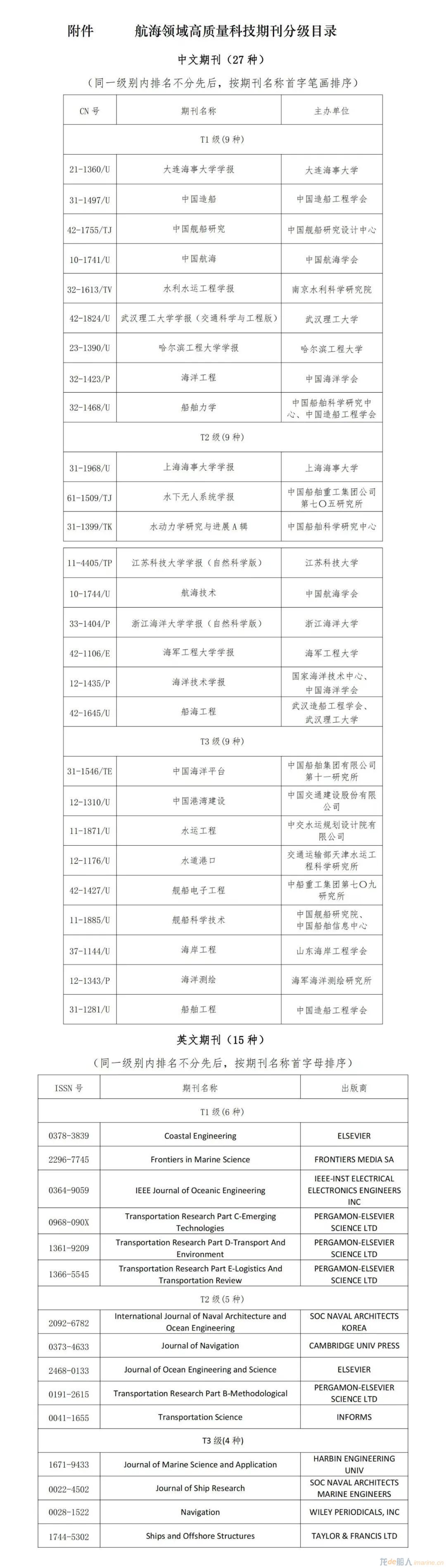
為深入貫徹落實中國科協、中宣部、教育部、科技部《關于深化改革培育世界一流科技期刊的意見,在中國科協的統一部署和總體安排下,由中國航海學會牽頭,經過組建專家委員會、制定實施辦法、遴選入評期刊、初評、復評、終評、專家委員會全體專家投票、公示等環節,最終選定航海領域高質量中文科技期刊27種、英文科技期刊15種納入《航海領域高質量科技期刊分級目錄》,從高至低分為T1、T2、T3三個級別(T1級為具備或已接近國內外頂級水平的航海科技期刊,T2級為具有較高水平的國內外知名航海科技期刊,T3級為學術界所認可的國內外優質航海科技期刊),其中中文期刊T1級9種、T2級9種、T3級9種,英文期刊T1級6種、T2級5種、T3級4種。
經過半個多世紀的發展,工業機器人在物料搬運、非接觸式加工、零部件裝配及自動化檢測等生產過程中,均有不同深度、廣度的應用。
其中,非接觸式加工中的焊接機器人作為工業機器人中應用最廣、最為主流的品類,全球在役的工業機器人中,約有半數以上應用于焊接加工流程。
1. 硬件發展
- 1957年,美國機器人公司Unimation成立,并于次年正式運營。
- 1959年,工業機器人Unimate問世,由美國發明家恩格爾伯格(Joseph Engelberger)和喬治德沃爾(George Devol)共同發明。

圖1 世界上第一臺工業機器人Unimate
- 1961年,美國通用汽車公司安裝了這臺工業機器人,標志著機器人在工業領域正式投入應用。
- 上世紀八十年代,美國軍方將工業機器人應用于軍船的建造,工業機器人逐漸走入航運及船舶制造業。
- 上世紀九十年代,日本大型造船企業開始采用機器人進行焊接作業。
- 1995年,韓國船企改造生產線,焊接機器人逐步應用于造船工業。
- 21世紀以來,北歐各企業的焊接機器人生產、應用逐步成熟,奧地利、芬蘭等國的焊接機器人系統廣泛應用于丹麥、德國、新加坡等國的大型船企。
- 目前,日韓船企正在逐步完成小組立焊接生產線的機器人化,工人投入逐漸減少的同時,生產效率有了明顯提高。
2. 軟件發展
工業機器人作業編程軟件的發展大致可以分為三個階段,即通過示教進行作業再現、通過離線編程進行作業下發及自主識別編程階段。
其中,示教再現階段較為初級,即通過人工導引或示教盒引導機器人末端的夾持器、焊槍等功能執行器具依照固定的路徑及輸出參數完成預設的動作,該過程稱為“示教”。由用戶示教過程編制出的程序可被機器人記憶并不斷再現,并指導機器人完成重復性較高的工作。
工業機器人發展初期,投入生產的機器人多通過人工導引示教進行編程。上世紀末,使用示教盒示教的方式逐漸興起。
目前,通過示教作業進行編程的機器人仍占據工業生產領域的主流地位,在汽車、消費級數碼3C產品等領域的生產裝配得到了大規模的應用。我國 “七五”和 “八五”期間研制、生產的工業機器人多屬示教再現型機器人。
但針對焊縫復雜、小批量、柔性化生產的工件,示教再現型機器人應用效率較低。車體焊接過程中,焊接機器人針對單個工件的示教作業需數月時間,而施焊過程僅需十余小時。
因此,施焊與編程同步進行、幾乎不存在停機等待時間的離線編程逐漸成為興起。
離線編程模式中,操作者讀取到目標焊件三維模型后,在相應的軟件環境下通過離線編程軟件遠程編輯、修改機器人運行軌跡,軟件編譯模型和指令生成機器人作業代碼,控制機器人依設定軌跡運行。
另外,部分軟件中帶有仿真模塊,通過工件模型、生產設備模型及廠房設施模型針對機器人的運行軌跡進行仿真模擬,在焊接作業下發前確認焊接路徑的合理性,可避免造成設備及焊件損壞。
相較于傳統的示教編程而言,離線編程作業程序在目標焊件運送至產線前完成編制,編程工作不占用焊接機器人工作時間,在上一焊件施焊完畢前完成下一焊件程序的編制,時間上完成銜接,極大程度提高了小批量、柔性生產流程中的作業效率。
但是,盡管不占用機器人工作時間,但對于較為復雜的焊件而言,離線編程中焊縫路徑建立、軌跡和工藝規劃仍非常繁瑣。

圖2 典型離線編程的關鍵步驟
隨著各種測量、傳感技術日益成熟,人工智能、圖像識別等新技術不斷涌現,關于機器人的自主編程技術的思考也在逐年增加。
人們希望通過視覺、超聲等傳感器及工業相機獲取現場目標焊件及周圍環境信息,達到自動識別工件外形尺寸、類型,通過圖像處理算法提取工件數模,并通過特征點自動識別目標焊縫位置、自動規劃機器人焊接路徑、自動生成工藝特征等參數,最終自動生成帶機器人運動位姿的焊接作業程序的程度。
程序無需依賴使用者的經驗,而是通過讀取焊接工藝專家數據庫來匹配對應工藝需求,進而通過需求及參數匹配對應焊接工藝,并根據工藝信息自適應生成機器人焊接程序,下發至機器人執行。
該方式不僅無需停機操作,且無需操作人員干預,適合在自動化程度需求較高工業環境下,針對復雜焊件做到真正的“無人化”、“自動化”生產。
目前,自主編程方式已逐步應用于焊縫規律的簡單結構件,還無法完全保證復雜結構的無人化投產。
車間是船舶建造的最前沿,是分段建造的主要場所。分段建造過程具有工種多、程序多、品種多元、工程浩大、作業面廣、技術綜合性較強、作業條件差、施工周期長等特點。車間制造水平的高低直接關系到船舶建造效率與質量,對縮短工程成本與改善工作人員作業條件具有重要影響作用。
先進造船國家在二十世紀五十年代開始對車間制造進行重點管控并逐步實現了智能化。國外先進造船企業以船體分段建造為起點,紛紛投入建設智能車間管控系統,實現車間實時、透明管理。此外,大數據、5G、人工智能等新技術不斷應用到數字化造船過程中,進一步提升了車間的智能管控水平。
相比之下,盡管我國一直以來都在大力發展改善車間制造工藝,引入了大量的自動化設備,并且在部分離散點上獲得了一定的效果。但是由于我國技術起步較晚,與先進造船國家相比,依然存在著較大的差距。
2、船舶智能制造車間通用模型
以船體分段智能車間為例,提出船舶智能制造車間通用模型,其他車間可根據實際生產需求進行適當調整。
2.1總體架構
船體分段智能車間總體架構包括網絡基礎層、設備層、控制層、制造管控層、決策層5個層面。
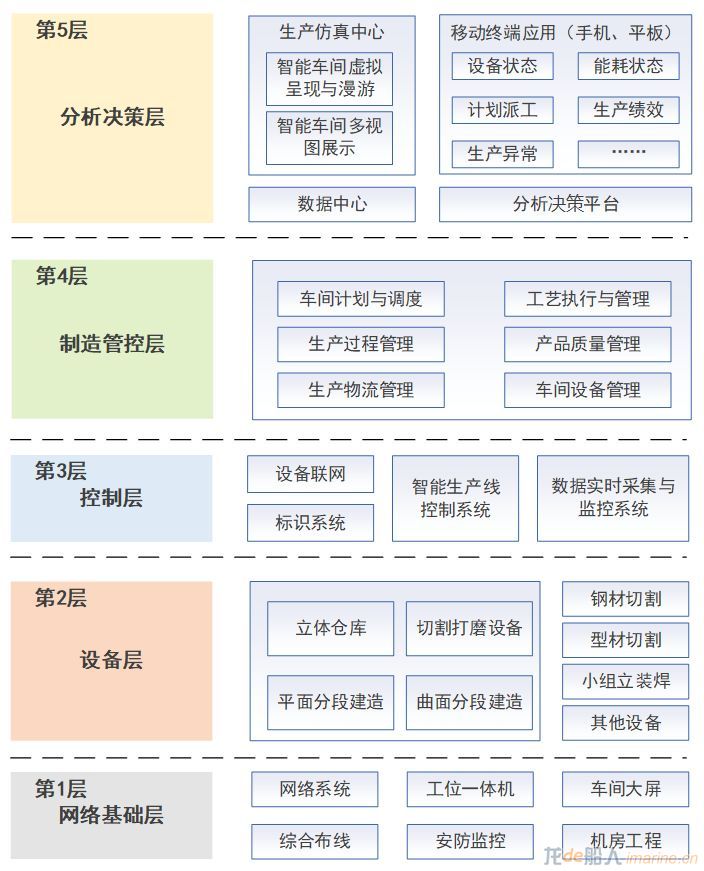
圖1 船體分段智能車間總體架構
2.2船體分段智能車間運行機制
制造過程的設備運行數據、生產計劃與調度數據、工藝設計數據、質量檢驗數據等車間數據在船體分段車間各智能設備、功能模塊與決策管理系統之間流通,形成一個閉環的數據流通機制。
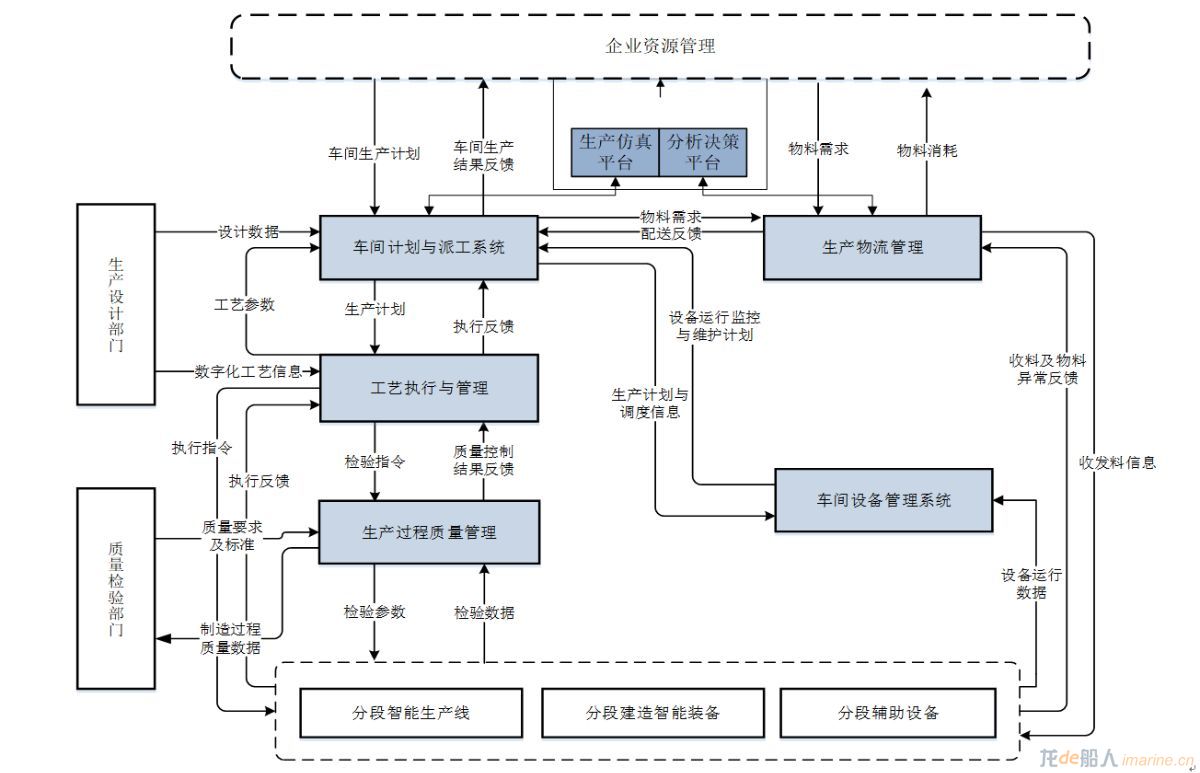
圖2 船體分段智能車間數據流通機制[1]
2.3信息交互
(1)數據傳輸
為執行船體分段智能車間基礎層的工作任務處理,實現車間MES、控制系統與現場設備之間的信息傳輸,可采用OPC-UA客戶端/服務器的通信系統架構。
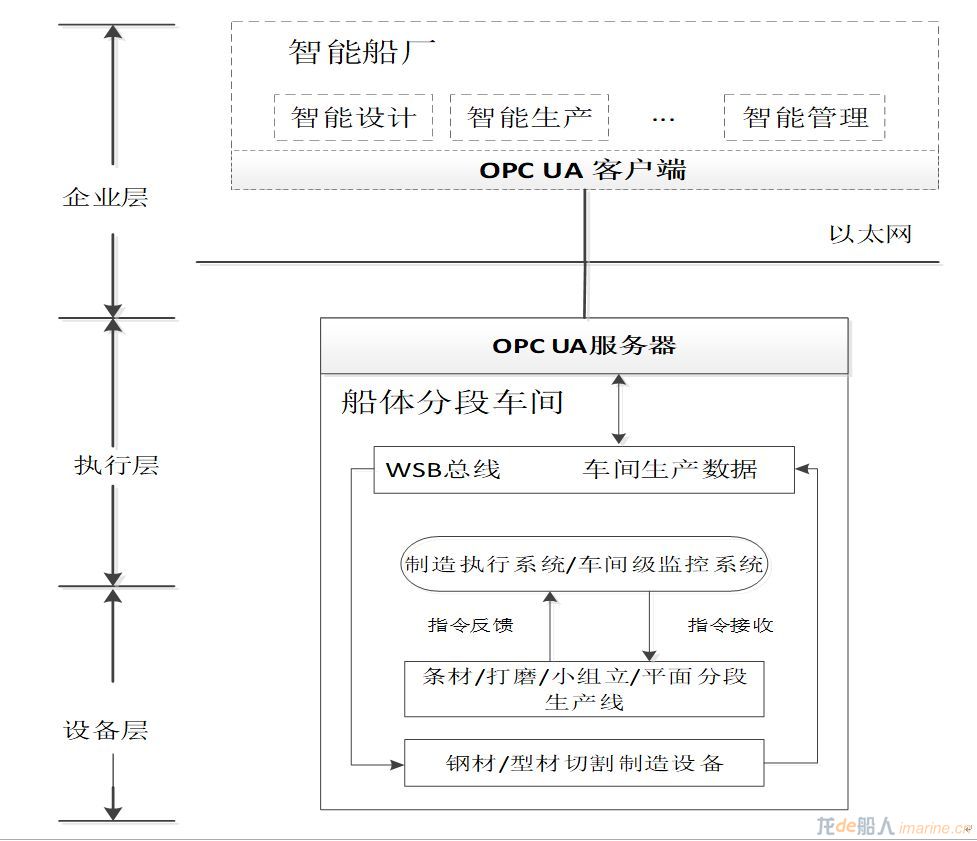
圖3 船體分段車間數據傳輸
(2)數據采集與存儲
船體分段智能車間應在企業數據字典定義的數據采集內容基礎上,結合數據實時性要求,利用合理的網絡通信方式與數據存儲方式進行數據的采集與存儲,并與企業及數據中心進行對接。包括:
1)應對車間所需數據進行采集、存儲和管理,并支持異構數據之間的格式轉換,實現數據互通。 2)宜采用實時數據庫與歷史數據庫相結合的存儲方式。 3)應具備信息安全策略,并支持更新和升級,如訪問與權限管理、入侵防范、數據容災備份與恢復等。
(3)數據字典
船體分段智能車間應建立數據字典,具體要求如下:
1)包括車間需要交互的全部信息,如設備狀態信息、生產過程信息、物流與倉儲信息、檢驗與質量信息、生產計劃調度信息等。 2)描述各類數據基本信息,如數據名稱、來源、語義、結構以及數據類型等 3)對船體分段智能車間進行細化、定制化,定制專門用來描述船體分段車間的數據字典。 4)船體分段智能車間系統主要實現船舶設計系統中加工信息提取、加工工藝數據庫構建、加工指令生成與執行、加工過程監控信息記錄與分析、生產計劃安排、報表生成等功能。
參考文獻: [1]GB/T37393-2019 數字化車間 通用技術要求
]]>2016年,川崎重工業株式會社、巖谷產業株式會社(Iwatani)、日本電力開發有限公司(J-POWER)和殼牌日本公司等4家企業共同成立了“零碳氫能源供應鏈技術研究協會(CO2-free Hydrogen Energy Supply-ChainTechnology Research Association,簡稱HySTRA)”。HySTRA的主要目標是研發制氫、運輸、儲存和用氫所需的技術,最終打通氫能源產業鏈技術瓶頸,實現零碳清潔社會(見圖1)。
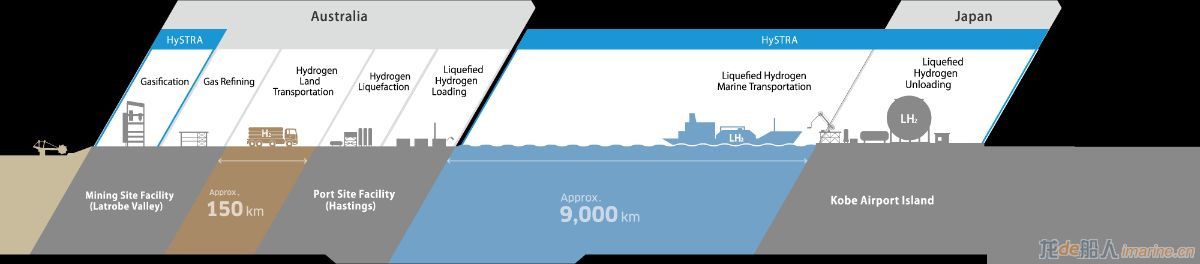
圖1 HySTRA氫能源供應鏈
為構筑氫能源供應鏈,以海外的豐富資源制造氫,并安全有效地大量運輸到日本,是氫能源流通不可或缺的基礎。在HySTRA的重點示范項目研究中,川崎重工承擔了“運輸”一環中的液化氫運輸船的開發建造任務。
川崎重工從2014年開始著手研發世界上第一艘液化氫專用運輸船,利用LNG船的設計和建造所積累的豐富經驗,并在此基礎上開發了液化氫儲存系統,突破了船舶應用的關鍵技術。今年5月,川崎重工公布了使難以處理的氫氣在零下253℃液化、運輸量高達1250m3的全球首艘氫運輸船“Suiso Frontier”,該船于12月初入級日本船級社,12月24日成功開啟了首次航行,這也標志著HySTRA重點示范項目的成功。
本文主要介紹全球首艘液化氫運輸船開發建造的相關課題和關鍵技術等,供業內同仁參考。
1.背景
氫的運輸形態有高壓氣體和液體兩種。
高壓氣體主要是燃料電池車從儲氫站等處少量運輸時采用的形態。雖然在安全存儲的基礎上將壓縮狀態的氫氣進行高壓化有一定的限制,但優勢是需求方的裝置和操作等都比較簡單。
在大量運輸方面,氫呈液體狀態比較有利。氫液化后,在大氣壓下的體積是氣體的八百分之一,非常壓縮。但是液化氫比LNG溫度更低,為-253℃,所以其存儲和處理都必須采取特殊的裝置和措施,迄今為止幾乎沒有進行過液化氫的海上運輸。
另外,關于氫的運輸方法,也有將其轉換為氨或者甲基環己烷等有機化合物的相關研究和探討。如果是化合物狀態,則不需要在極低溫下處理,但存在作為有毒物如何處置,以及提取氫時需要額外能量等問題。
日本川崎重工一直致力于開發和推廣從事陸上氫氣運輸的高壓氫氣拖車及液化氫運輸集裝箱。拖車采用45 MPa的耐壓復合容器,能夠運輸供72臺燃料電池車用的360kg的高壓氫氣;集裝箱為ISO 40英尺規格的真空復合隔熱容器,能夠運輸2.8噸液化氫。
川崎重工以其現有的在LNG運輸船和陸地液化氫儲罐方面的設計制造技術為基礎,目前承擔了零二氧化碳氫供應鏈構想中的“運輸”一環,目的是建立和掌握全球首艘液化氫運輸船的設計和制造技術。在截至2016年的FEED階段,進行了關鍵試驗和規格研究;2017年進入建造階段,實施設計和制造;2020年,針對澳大利亞褐煤資源制氫并運輸到日本的裝卸、運輸技術進行驗證,并以此為目的開展了示范船的建造。
2.示范船開發建造方面的課題
設計和建造運輸液化氣體的船舶,要遵照國際海事組織(IMO)的“液化氣散裝運輸船舶結構及設備相關國際規則(即IGC Code)”。不過,現有IGC Code的適用對象為LPG和LNG,并未包含液化氫。對此,IMO以批準日本和澳大利亞共同提案的形式,發布了針對日澳間液化氫海上運輸的“臨時建議事項”。另外,日本船級社(Class NK)又基于該IMO的“臨時建議事項”,發布了“液化氫運輸船指南”,對各項要求更具體細化地做出規定,補充了人為思想和事故情節因素等內容。示范船按照上述標準規范來設計和建造,確保了船舶的較高安全性。
示范船的完成效果圖如圖2所示。以具有建造實績的內河用LNG運輸船為基礎進行船型設計,裝載液化氫專用貨艙。液化氫與LNG相比,更容易因外部傳熱而氣化,且因溫度極低,結構會產生較大的熱收縮,這些都是液化氫運輸船實船應用需解決的課題。
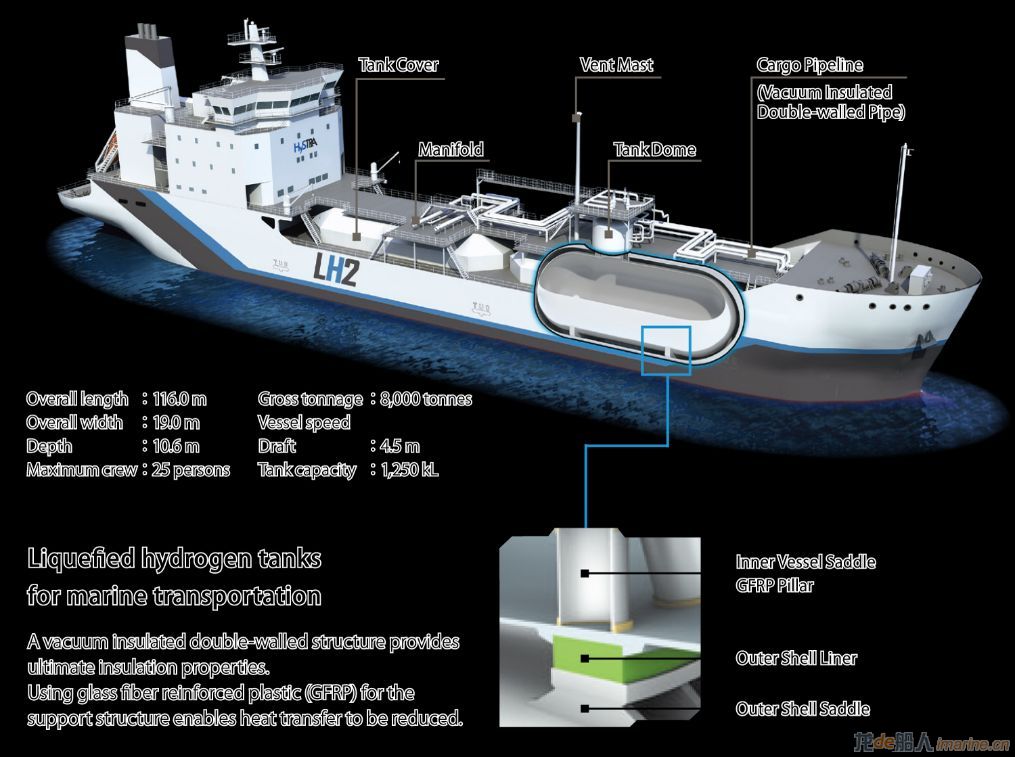
圖2 示范船
2.1 液貨圍護系統CCS(Cargo Containment System)
根據規范,必須要控制CCS的壓力和溫度來應對外部傳熱。在不將外部傳熱產生的蒸發氣體排放到CCS外部而蓄壓的情況下,必須能夠保持壓力安全而航行到目的地。并且,液貨艙壁及CCS的加強結構和配管所受的外部傳熱也必須控制在最低。
另外,由于在海浪航行中船體搖晃,CCS的結構必須穩固。
2.2 液貨配管
為控制液化氫運輸過程中因氣化導致裝卸效率降低,排除配管表面生成液化氣而形成高濃度氧環境,以及避免液化氣滴落引起船體結構損傷的危險,液貨配管必須具備高隔熱性。
另外,由于液化氫裝卸過程中的熱脹冷縮產生較大內應力、以及與陸上配管不同的船體變形會引起強迫位移,必須保護液貨配管免受上述影響。
2.3 液貨設備
液化氫的溫度比LNG還要低90℃,因此液貨設備的隔熱性能要求高于LNG使用的設備,需要選擇合適的材料并確認其耐久性,針對氫的物理特性,采取耐久、高隔熱及應對氫泄漏等措施。
3.開發設計和關鍵技術
3.1 CCS
CCS采用獨立于船體結構的蓄壓臥式圓筒型,相當于IGC Code和Class NK鋼制海船規則中定義的符合壓力容器標準的Type C型儲罐。示范船裝載2個容積為1250m3的CCS,其中1臺置于船首。
(1)CCS隔熱系統
液化氫用CCS的隔熱性能必須比LNG用CCS高約10倍。熱的傳導方式有對流、熱傳導和輻射三種。為抑制對流和熱傳導等從CCS表面侵入的熱量,采用由內殼、外殼構成的真空雙層殼結構。
連接內殼和外殼之間的加強結構、配管、計量儀器等因熱傳導而成為外部傳熱路徑。對此,采用熱傳導率低的材料,減小結構材料的截面積,延長傳導路徑等措施來降低其影響。為降低輻射熱帶來的熱傳導,在雙層殼的真空槽內采用反射率高的金屬鍍氣膜層壓而成的真空隔熱材料。設計時充分考慮了日常航行中CCS內部產生的溫度和壓力,在澳大利亞與日本的航行中產生的蒸發氣體可不釋放到CCS外。另外,在CCS內殼內填充氮氣而外殼表面維持常溫,不生成液化氣或液化氮等。
此外,為保證運輸過程中的航行安全,船舶安裝了“真空隔熱性能劣化監控系統VIPDM(Vacuum Insulation Performance Deterioration Monitoring System)”。該系統能夠對真空劣化的速度進行即時監測,在隔熱性能惡化的早期階段預測風險,確保隔熱性能的持續和航行安全。
(2)CCS加強結構
CCS的雙層殼結構如圖3所示,內殼、外殼采用適用于極低溫環境的奧氏體不銹鋼材料。船體在航行中會搖晃,內殼與外殼不接觸而保持穩定的加強結構將導致外部傳熱量、特別是由熱傳導產生的傳熱量增加。對此,CCS的內殼加強采用由隔熱性能和強度優越的玻璃纖維強化塑料GFRP制成的鞍形結構。獲得真空狀態和極低溫狀態下GFRP加強結構的強度、熱傳導、釋氣等諸多特性,設計上非常耐用。
CCS內部在建造過程中以及定期檢查時為常溫,但在滿載狀態時為極低溫。另外,CCS內的溫度分布會根據壓載航行或者裝卸時的液位狀態而發生變化。內殼因溫度變化熱脹冷縮、外殼維持常溫狀態,因此在內外殼之間會因溫度差而產生相對位移。對此,采用了以前后兩處的圓弧狀鞍形結構支撐內殼,滑鞍加強在外殼的內表面上滑動來吸收相對位移的結構。
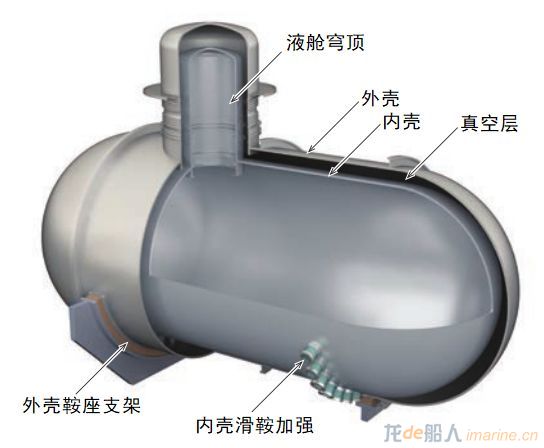
圖3 CCS的雙層殼結構
(3)液艙穹頂
由于溫度差導致內殼和外殼之間的相對位移較大,所以在CCS的液艙穹頂處集中布置貫通于CCS的配管等,包括液貨管、電線管、聯絡用人孔等。
(4)CCS制造技術
川崎重工在火箭燃料用球形液化氫儲罐、陸地液化氫儲罐及拖車等雙層結構真空隔熱儲罐制造方面經驗豐富。另外,也具備制造船用LNG大型液貨艙的實績。川崎重工通過綜合應用這些技術來制造CCS。
3.2 真空雙層配管
由于液貨管要保證較高的隔熱性能,因此與CCS同樣采用雙層結構的真空隔熱方式。內管和外管必須保持穩定、不能接觸,另外內管和外管也會因熱脹冷縮而產生長度差。對此,以陸地儲氫設備采用的真空雙層管規格為基礎,考慮到裝卸過程中的熱脹冷縮和船體的動、靜變化,開發了船用真空雙層管。低溫用閥也采用了隔熱性能高的附帶真空套管的長閥蓋型閥。
3.3 液貨設備
液貨設備需耐受氫的物理性質,在LNG船上已有應用實績的船用設備以及陸地應用設備的基礎上,對所有的材料和規格進行修改,必須適應氫的物理特性及船上的使用環境。對于主要設備,在開發階段即實施液化氫應用試驗,對設備操作上的風險進行了評估,并針對相應問題給出對策。
為應對高隔熱性及泄漏的風險,采用如圖4所示的插銷式接頭(Bayonet joint)。該接頭作為液化氫用絕緣接頭,在與裝卸基地的裝卸臂系統LAS連接的岸上連接部位應用廣泛。除此之外,液貨處理設備還有氫氣加壓用的壓縮機、液化氫氣化用的蒸發器、加熱極低溫氫氣用的加熱器等。
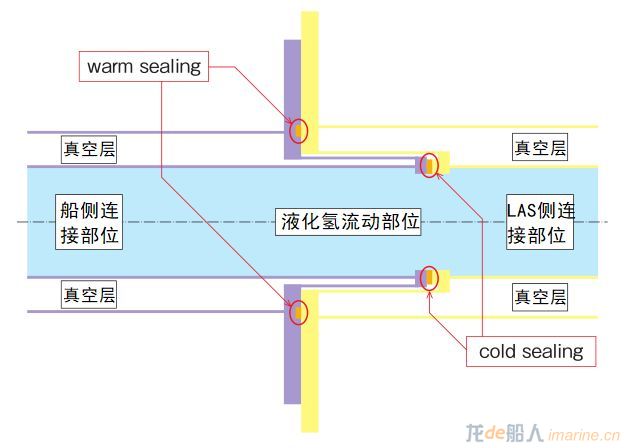
圖4 插銷式接頭
4.建造及驗證
示范船于2017年開始進行CCS的設計制造,2019年1月船體開工建造,同年12月舉行了下水儀式(見圖5)。

圖5 示范船下水儀式
4.1 船體
示范船的主尺度等概要信息如表1所示。
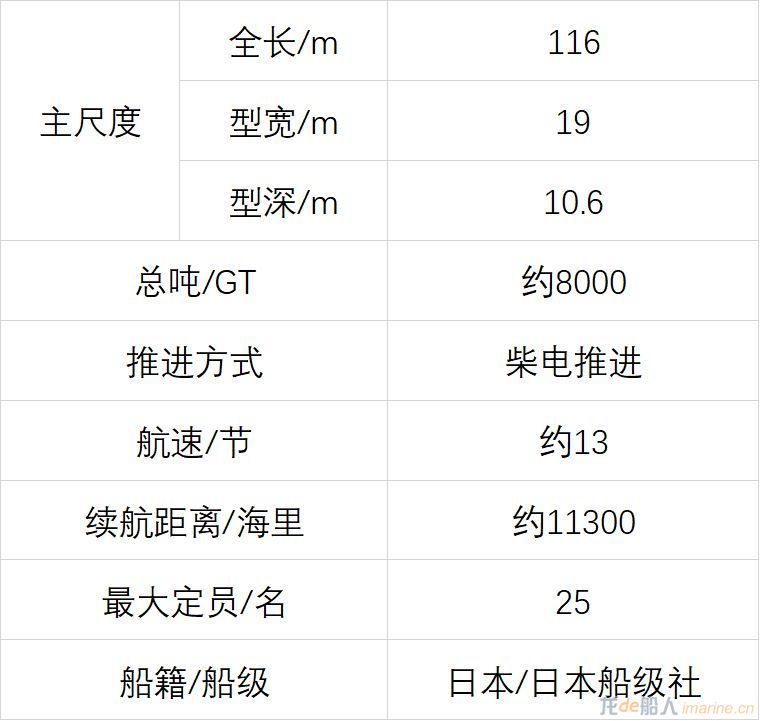 表1 示范船概要
表1 示范船概要
由于采用了蓄壓式CCS,所以在航行中不需要在船內處理蒸發氣體。推進方式采用由3臺主柴油發電機向2臺推進馬達提供電力,通過減速機驅動螺旋槳的柴電推進方式。船體上安裝了船首推力器、西林舵(高升力、大舵角舵)及4片可變螺距螺旋槳,可提高船舶離靠岸時的操作性能。
4.2 CCS
2020年3月完成的CCS如圖6所示。其內部配置了浸水型馬達驅動泵、固定管系的管子支架,用于有效冷卻CCS內部的裝備等。

圖6 液貨圍護系統(CCS)
4.3 驗證試驗
2020年液化氫運輸船建成后進入了驗證階段。在驗證階段I,為確認液化氫運輸船的CCS、配管及液貨設備的作用、性能和安全性,在神戶市近海的神戶機場人工島東北部建設中的氫存儲裝卸基地,依次進行了如下試驗項目:
- CCS內氣體置換(高效氣體置換法)
- CCS冷卻(CCS高效冷卻法)
- 液貨加裝(從基地加裝液化氫)
- 液貨泵工作(極低溫環境下的工作)
- 其他貨物裝置的工作(作用、性能)
- 隔熱性能確認(CCS及配管的隔熱性)
- 液貨滿載試驗(近海滿載航行和裝卸順序)
在接下來的驗證階段II,實施日本-澳大利亞航線的滿載航行試驗。
5.結束語
在示范船驗證中,對液化氫的裝卸操作以及實際海域的CCS隔熱儲藏性能進行了確認,川崎重工希望能夠建立未來大量運輸氫的技術,并繼續推動液化氫運輸船的大型化開發。
川崎重工開發的該液化氫運輸船也是日本國立研究法人、新能源產業技術綜合研發機構(NEDO)支持的項目——“由未開發的褐煤制造氫氣并構筑氫氣大規模海上運輸供應鏈”中的一項研究內容。
(本文根據《川崎重工技報——氫能源供應鏈特輯》編譯)
復合材料在制造和使用過程中可能會受到疲勞、異物、環境條件(濕度、溫度)等因素的影響而發生損傷,即使是低速沖擊,也可能導致結構內部的損傷。復合材料中存在基體開裂、分層、纖維斷裂等損傷,如果沒有在早期檢測到損壞,可能會發生災難性的故障。因此,對復合材料進行有效的內部質量檢測和早期損傷檢測是非常重要的,但復合材料的各向異性特性使得損傷評估較為困難。在研究和工程實踐中的經驗表明,采用無損檢測技術對復合材料的損傷進行評估是比較合適的。
本文簡要介紹了各種用于航空航天、汽車和海洋結構的復合材料在疲勞載荷和沖擊下發生的裂紋和分層等損傷的無損檢測技術和健康監測技術。
根據檢測和信息處理的原理和方式的不同,目前有70多種無損檢測技術,主要包括射線檢測(X射線、伽馬射線、粒子射線等)、電、電磁檢測(電阻法、電位法、渦流法、磁粉法、核磁共振、微波法、單獨激發電子發射等)、機械及光學檢測(目視法、內窺鏡法、熒光法、著色法、脆性涂層和光彈性涂層線法、激光全息、應力測試等)、熱力學方法(熱電動勢法、液晶法、紅外熱圖法等)、化學分析方法(電解法、激光法、離子散射法、俄歇電子分析等)。
1、超聲檢測
傳統超聲檢測(UT):UT是各種無損檢測技術中應用最廣泛、最有效的檢測方法。根據材料中缺陷區域與正常區域的超聲反射、衰減和共振的差異來確定缺陷的大小和位置,然后根據材料的反射特性和實際經驗來判斷缺陷的類型。
超聲可以檢測復合材料中的層狀缺陷、氣孔、裂紋和夾雜物,對材料密度、纖維取向、彈性模量、厚度和幾何形狀的檢測也有重要作用。超聲C掃描以其檢測速度快、顯示直觀、能準確判斷大型復合材料構件的體積缺陷而被廣泛應用。
由于復合材料結構的矛盾性和性能的離散性,其缺陷機理較為復雜。復合聲衰減大,導致信噪比低。不易區分,同時耦合劑會對材料造成污染。
超聲導波檢測:超聲導波檢測是近年來一個新的研究熱點。導波是由于介質邊界的存在而產生的。介質通過多次反射或折射,使縱波和橫波發生模式轉換,形成復雜的干涉導波。
超聲導波是一種快速寬范圍的初始探測方法,不能進行準確的定量檢測,一些可疑部位還需要使用其他檢測來做出最終的評估。該方法主要用于管道的無損檢測。
超聲相控陣技術:超聲相控陣是一種多波束掃描成像技術,它通過控制每個陣列傳感器陣列單元發射或接收脈沖的時間,使球面波在傳播過程中疊加,實現光束焦點和方向的變化,然后結合機械掃描和電子掃描完成成像。
與UT相比,該技術具有聲束相位控制和動態聚焦的特點。無需或稍微移動探頭即可完成復雜結構的高速、全方位、多角度檢測。對于不穩定的板、管結構,超聲相控陣能有效提高檢測效率,簡化設計,降低成本。
2、射線檢測
X射線檢測:X射線無損檢測是復合材料損傷檢測的常用方法,包括X射線膠片照相和X射線數字射線照相。
膠片照相是檢測復合材料中孔隙和夾雜物等體積型缺陷的一種很好的方法,但對分層缺陷的檢測非常困難,只能檢測垂直于表面的裂紋。
X射線數字射線照相技術應用于復合材料產品檢測的成像質量可與X射線膠片照相技術相媲美,并且在效率、經濟、遠距離傳輸等方面都優于X射線膠片照相。但當缺陷尺寸小于0.25mm時,膠片照相圖像質量遠優于數字射線照相。
中子輻射成像技術:通過準直器照射被測工件的中子源發出的中子束,由探測器記錄透射中子束的分布圖像。由于不同材料的中子衰減系數不同,透射中子束的像分布會形成缺陷和雜質的像。
中子對水、碳氫化合物、硼等輕元素的吸收系數較大,因此該方法對復合材料中腐蝕、水汽的檢測靈敏度高于X射線。但主要缺點是中子源價格昂貴,使用中子時要特別注意安全保護。
計算機斷層掃描(CT):該技術通過測量物體內部X射線的衰減系數,求解衰減系數值在剖面上的二元分布矩陣,建立剖面圖像。其特點是空間分辨率和密度分辨率高(通常小于0.5%),動態檢測范圍大,圖像尺寸精度高。
它可以實現直觀的三維圖像。在足夠的能量下,試樣的幾何結構不受限制。因此,國際無損檢測行業認為工業CT是無損檢測的最佳手段,但檢測效率低,成本高。
雙邊透射成像不適用于平板元件測試和大型元件的現場測試。
康普頓背散射成像技術(CST):CST是一種新型的射線檢測技術,其特點是單側非接觸、高靈敏度和快速三維成像。它非常適合于低密度、低原子序數材料的檢測。當檢測到的目標結構復雜或不能進行雙側成像時,CST具有獨特的優勢。
目前,CST在國外航空航天領域得到了廣泛的應用,但在中國仍處于探索階段。
3、激光探測
激光全息術(LH):LH是最早、應用最廣泛的激光無損檢測技術。根據缺陷零件和其他零件施加載荷時的不同變形,利用施加載荷前后的全息圖像疊加來判斷材料是否存在不連續。
LH可以檢測微米級的變形,其優點是靈敏度高,無接觸,不受材料和尺寸限制,測試結果保存方便。
激光錯位散斑(LS):LS綜合運用了現代激光技術、散斑干涉測量、圖像采集與處理技術、計算機技術和精密測試技術。其原理是通過加載前后激光散斑圖的疊加,在缺陷部位形成干涉條紋。
與LH相比,LS干擾小、檢出率高,便于現場檢測,易于調整靈敏度和測量面內位移。就LH和LS而言,LS性能更可靠,影響因素更少。
激光超聲檢測(LUT):LUT的基本原理是使激光和材料直接激發超聲波測試,或使用被測對象的材料作為介質來產生超聲波,然后使用非干涉技術,如表面網格衍射和反射,或使用干涉測量技術,如光學外差來確定材料的缺陷。
LUT不需要耦合劑,能通過不透明材料,具有較強的抗干擾能力,便于實現遠程控制和在線檢測。它具有快速、非接觸和不受被測物體結構形狀限制的特點。
4、其他檢測技術
電渦流檢測(ECT):ECT是一種基于電磁感應原理對導電材料表面及近表面缺陷進行檢測的無損檢測方法。
ECT具有速度快、自動化程度高的特點,非常適合于管材和棒材的檢測,同時可以檢測電導率、導磁率、熱處理、硬度和幾何尺寸。但ECT只能檢測導電材料,在檢測時邊界效果不佳。
超聲波測試(AU):AU利用壓電換能器或激光在材料表面產生脈沖應力波,應力波與材料微觀結構相互作用。通過多次反射和模態轉換,接收并提取應力波,找出能夠反映材料性能的因素,稱為應力波因子。
AU主要用于檢測微小缺陷簇及其對結構力學性能的整體影響,是一種材料完整性評估技術。
聲發射測試(AE):聲發射是利用損傷部位釋放的瞬態彈性波進行缺陷檢測的一種方法。聲發射研究的主要問題是如何識別聲發射源。
與常規無損檢測相比,它有兩個基本特點:一個是對動態缺陷敏感的,可以實時發現缺陷的產生和擴展過程;另一個是高靈敏度和分辨率,由于聲發射波來自缺陷本身,可以獲得豐富的信息。
微波測試:微波檢測是通過測量微波與材料相互作用后微波基本參數的變化來檢測材料內部缺陷。微波在復合材料中穿透能力強,衰減小。該方法無需特殊處理即可獲得內部缺陷區域的三維實時圖像。
微波對復合材料中不可避免的缺陷如氣孔、裂紋、分層和脫粘具有良好的靈敏度。但由于微波無法穿透導電性能較好的金屬及復合材料,因此無法檢測該類復合材料內部缺陷。
滲透測試(PT):PT是最早使用的無損檢測方法之一,該方法是讓液體滲透劑流入工件表面的開口缺陷中,然后用去污劑去除多余的滲透劑,用顯像劑識別缺陷。
該方法可檢測的缺陷類型較多,一次操作可檢測多個產品。但只能檢測出產品表面的開孔缺陷,不適用于多孔材料的檢測。
磁粉檢測(MT):MT是一種基于磁粉與漏磁場相互作用的表面及近表面缺陷檢測的無損檢測方法。可用于檢測裂紋、褶皺、夾層、夾渣等,尤其對裂紋敏感。
MT具有設備簡單、操作方便、檢測直觀快速、靈敏度高等優點。
5、小結
目前,所有應用的復合材料無損檢測技術都有其優點和局限性。復合材料無損檢測技術未來的發展方向主要是提高材料檢測自動化水平、原位檢測自動化水平、定量檢測自動化水平和結構健康監測水平。隨著復合材料性能要求的不斷提高,多種無損檢測方法的綜合交叉發展可以更好地提高檢測的有效性。 ]]>
中國船舶工業非金屬材料技術檢測中心在檢測工作開展過程中,需要進行大量的涂層測厚、附著力測試等工作,不可避免地要對測試結果進行不確定度分析。
本文以涂層厚度測量結果的不確定度分析為例,分析影響測量結果的主要因素,保證檢測工作的完善性和可信度。
1. 測量方法
依據GB/T 13452.2-2008使用Qnix 4200磁阻法測厚儀測量覆層厚度。根據Qnix 4200磁阻法測厚儀使用說明書的規定,當測厚儀的測頭與覆蓋層接觸時,測頭和磁性金屬基體構成閉合磁路,由于非磁性覆蓋層的存在,使磁路磁阻變化,通過測量其變化可計算覆蓋層的厚度。
2. 測量模型
示值誤差計算公式:δH = H(_) – H,式中: δH為測厚儀在該點的示值誤差;H(_)為該點測厚儀的示值平均值;H為厚度片的實際值。
3. 不確定度來源
在測量過程中,可能影響結果的因素主要有以下幾種: (1)所測材料引入的誤差,比如:材料基體的電導率、材料的邊緣效應、基體金屬的厚度等; (2)測量方法引入的誤差,比如:探頭的放置方式、對探頭施加的壓力等; (3)環境溫度引入的誤差; (4)儀器設備引入的誤差,比如:校準厚度片引入的誤差、涂層測厚儀分辨力引入的誤差、測量重復性引入的誤差等。
對于以上的影響因素,有些只能通過改進一起或者測量方法來消除誤差。影響測量不確定度相對嚴重的因素主要有:儀器測量重復性、標準厚度片、儀器分辨力。
4. 不確定度的評價
根據防腐涂層的厚度范圍、所用儀器的測量范圍、標準厚度片厚度值,將測量不確定度分成三段表示,即:(0~100)μm、(100~250)μm。
4.1 測量重復性引入的不確定度分量
針對防腐涂層厚度測量不確定度的三個評定范圍,試驗選取了2個標稱厚度值分別為:48.5 μm、247 μm的標準樣片。通過分別測量10個點進行涂層測厚儀結果的不確定度評定。測量結果如下表:
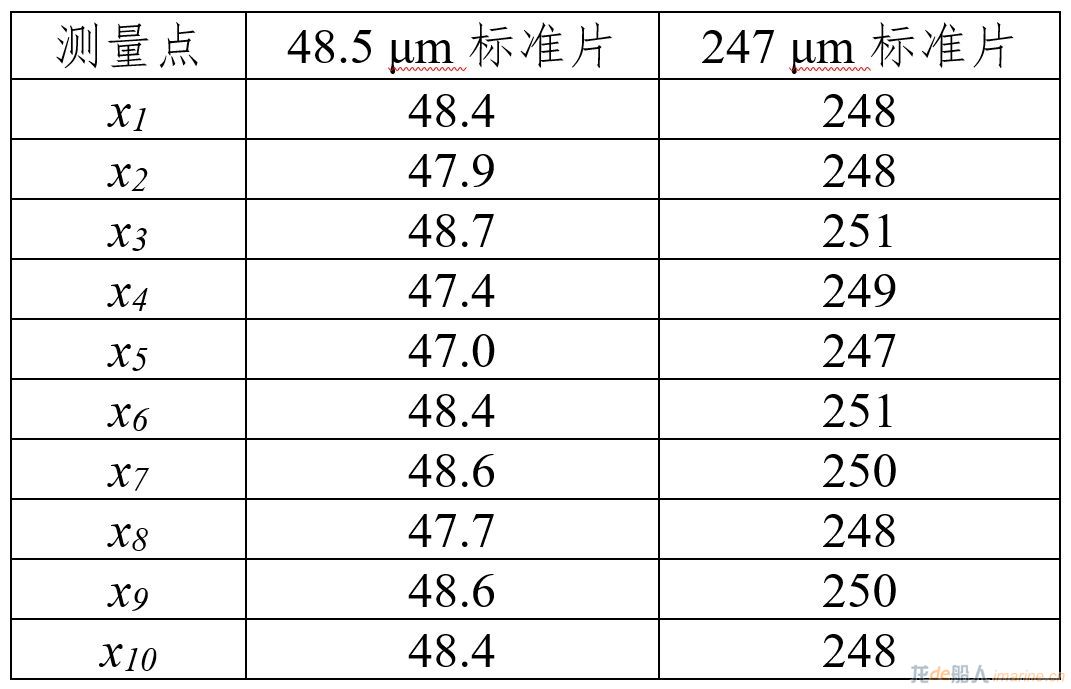
表1 標準樣片測量結果
根據公式(1)計算2個標準厚度片測量結果的算數平均值,如下:
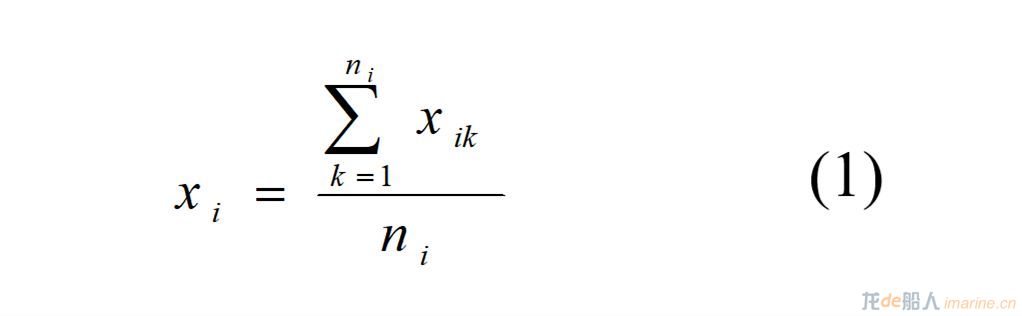
受檢段(0~100)μm的算數平均值為:48.1 μm;
受檢段(100~250)μm的算數平均值為:249 μm;
根據公式(2)計算2個標準厚度片的方差和標準差,如下:

受檢段(0~100)μm的方差為:0.303,標準差為:0.55; 受檢段(100~250)μm的方差為:1.8,標準差為;1.34。
根據公式(3)計算2個標準厚度片的標準不確定度,如下:
受檢段(0~100)μm的標準不確定度uA1 = 0.174 μm; 受檢段(100~250)μm的標準不確定度uA2 = 0.424 μm;
4.2 標準厚片引入的不確定度分量
根據JJG 818-2018《磁性、電渦流式覆層厚度測量儀檢定規程》中校準厚度片的厚度測量結果不確定度可知:當厚度片厚度≤ 50 μm時,測量不確定度U為0.2 μm,k = 2;當厚度片厚度>50 μm時,測量不確定度U為0.4%H(H為標準厚度片的標稱厚度值),k = 2。
根據公式(4)得到:
受檢段(0~100)μm的標準不確定度uB1 = 0.1 μm; 受檢段(100~250)μm的標準不確定度uB2 = 0.212 μm;
4.3 儀器分辨力引入的不確定度分量
由儀器分辨力d引入的不確定度分量uC呈均勻分布,由此帶來的標準不確定度為:

則0.1 μm分辨力(測量范圍< 100 μm)時,uC1 = 0.03 μm;1 μm分辨力(測量范圍≥ 100 μm)時,uC2 = 0.3 μm。
4.4 合成標準不確定度
由于各不確定度分量之間不存在值得考慮的相關性,因此合成標準不確定度可由公式(6)得到:

因此: 受檢段(0~100)μm的合成標準不確定度ud1 = 0.203 μm; 受檢段(100~250)μm的標準不確定度ud2 = 0.561 μm;
4.5 擴展不確定度
取置信水平95%,則k=2,擴展不確定度可由公式(7)計算:

得到受檢段(0~100)μm的擴展不確定度U1 = 0.406 μm; 受檢段(100~250)μm的擴展不確定度U2 = 1.122 μm;
5. 測量不確定度總結
用Qnix 4200磁阻法測厚儀測量標準試塊厚度的測定結果的不確定度U1 = 0.406 μm,U2 = 1.122 μm,包含因子k = 2。
參考文獻: [1] JJG 818-2018《磁性、電渦流式覆層厚度測量儀檢定規程》 [2] GB/T 13452.2-2008 《色漆和清漆 漆膜厚度的測定》 [3] 徐晶晶. 鋼結構防腐涂層測厚的測量不確定度評定[J]. 建設與發展. 2016, 7: 2960, 3023.
附言: 中國船舶工業非金屬材料技術檢測中心成立于1988年10月,原為中國船舶工業總公司非金屬材料技術檢測中心,掛靠上海船舶工藝研究所,屬于獨立建制的二級機構,擁有中國國家認證認可監督管理委員會頒發的檢驗檢測機構資質認定證書(CMA),擁有中國合格評定國家認可委員會實驗室認可證書。
檢測中心作為第三方檢測機構,承擔船舶行業涂料及非金屬材料和重點建設項目等的檢測任務和技術服務,遵循客觀獨立、公平公正、誠實信用的原則,積極開展船舶、海工、橋梁、鐵路、市政工程、電力、石油化工等行業的非金屬材料檢測業務,以及ISO標準和國家標準制修訂等工作。主要業務包括涂料性能檢測、塑料性能檢測、非金屬磨料性能檢測、膠黏劑性能檢測、腐蝕檢測與評估及防腐方案設計(含現場)、涂裝質量現場檢測、國產化磨料、涂料的技術支持工作、涂漆前金屬表面處理及涂漆先進工藝技術研究和推廣、涂漆前金屬表面處理及涂漆工藝技術標準化等工作。
在船舶建造中,為了結構的輕量化,上層建筑等結構很多時候會采用鋁合金作為結構材料,而主船體結構為船用鋼材,這時候就不可避免的會遇到鋁-鋼異種材料連接的問題。由于鋁和鋼熔點上的差異以及鋁-鋼金屬間化合物的脆性等原因,使得鋁和鋼之間的異種材料連接非常的困難。
現有的主要鋁-鋼連接方式為使用爆炸焊制成的鋁-鋼過渡接頭,將船體用鋼材和上層建筑用鋁材分別的焊接在過渡接頭的兩側,以達到鋁和鋼連接的目的。而在實船應用中,由于焊接時的熱影響等原因,爆炸焊制成的鋁-鋼過渡接頭的可靠性有時會出現問題,這時候探索一種新的且更為可靠鋁-鋼連接方法變得非常的有意義。
2 鋁-鋼攪拌摩擦焊可行性試驗
2.1鋁-鋼攪拌摩擦焊攪拌頭設計
基于英國焊接研究所(TWI)的前期研究經驗,后續焊接試驗設計制造了下圖鋁-鋼攪拌摩擦焊試驗用攪拌頭,該攪拌頭由W-Re合金(鎢錸合金)制成。
 圖1 試驗用攪拌頭
圖1 試驗用攪拌頭2.2 鋁-鋼攪拌摩擦焊焊接試驗及結果評估
2.2.1 5083鋁合金攪拌摩擦焊試驗探索
當攪拌摩擦焊工具以600rpm的轉速旋轉、焊接速度為500mm/min、3°的工具傾斜角可以獲得外觀合格的焊縫,如圖2所示。

圖2 5083攪拌摩擦焊試板
2.2.2 5083鋁合金與E36鋼攪拌摩擦焊試驗探索
試驗前準備階段,試板均需按照工具輪廓對對接界面進行加工,并打磨對接界面附近氧化層。試驗將鋼板(E36)放置在焊縫的前進側,原因是在這樣的放置情況下,塑性鋁合金更容易與鋼發生混合形成接頭,且形成的接頭強度較高。
對于鋁鋼異種金屬攪拌摩擦焊而言,由于熔點差別較大,為防止鋁側過熱,采用攪拌頭偏置的方法,即攪拌頭的中心線偏向鋁這一側。使用初步開發出的參數焊接5083鋁板與E級鋼,根據經驗,攪拌頭相對于接縫線的位置非常關鍵,因此,接下來的試驗中,變化攪拌頭相對于接縫線的位置,焊接結果如下表:
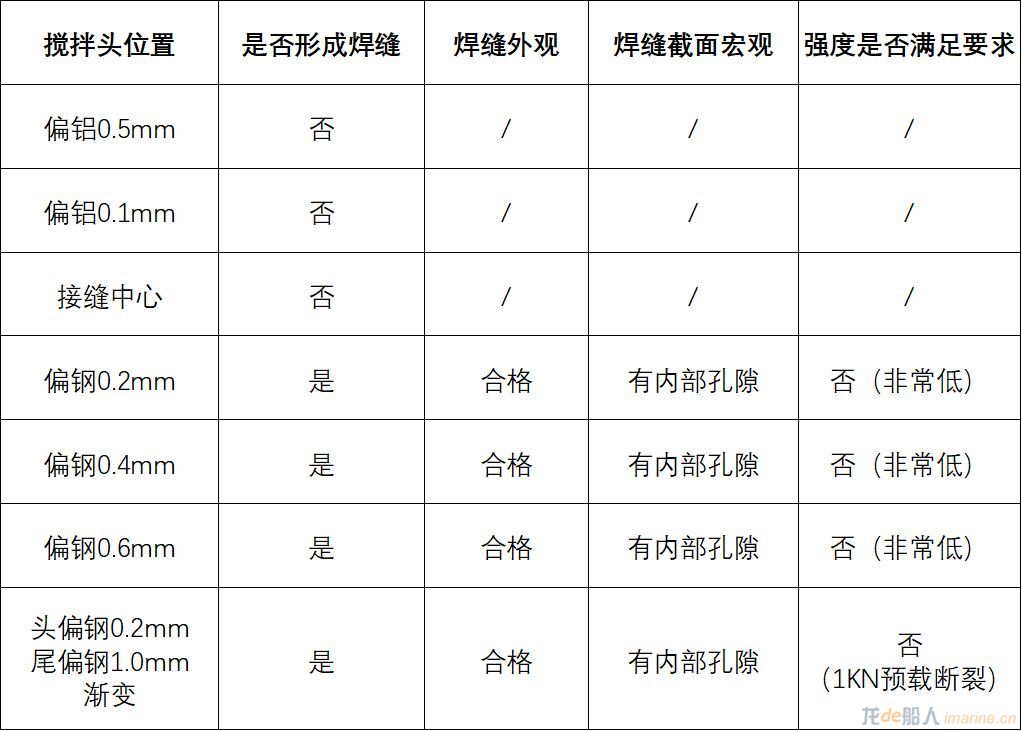
在上述實驗基礎上進一步改變轉速至400rpm、500rpm、600rpm,焊接速度(mm/min)至300、400、500,注意到隨著攪拌頭更多地進入鋼板,接頭的強度好像略有提高。但是,焊縫強度仍不足以切取試樣進行評估(宏觀斷面和拉伸強度)。焊接試驗未能在5083和 E 級鋼之間產生可接受的接頭焊縫。
2.2.3 6082鋁合金與E級鋼攪拌摩擦焊試驗探索
用6082鋁合金替代5083鋁合金與E級鋼進行攪拌摩擦焊,在焊縫開始位置,攪拌工具邊界進入鋼板0.2mm,然后按線性增加進入鋼材,焊縫長度為300mm,焊接末端進入鋼板量為1.0mm。焊縫表面形貌及斷面形貌如下圖所示。在焊縫兩端各取一個拉伸試樣,抗拉強度分別為175MPa、215MPa。
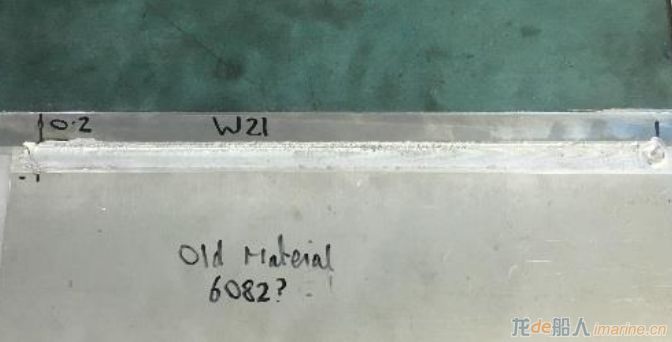 圖3 6082與E級鋼焊縫表面形貌
圖3 6082與E級鋼焊縫表面形貌
 圖4 6082與E級鋼焊縫斷面形貌
圖4 6082與E級鋼焊縫斷面形貌
2.2.4 5083鋁合金與E級鋼通過6082鋁合金作為中間層的攪拌摩擦焊試驗探索
用前面較合適的參數,先將6082鋁合金和5083鋁合金焊接在一起,從距離焊縫20mm處切掉6082鋁合金,表面及對接面加工后使剩余的6082與E級鋼焊接在一起,用兩道相鄰焊縫將5083鋁合金通過6082鋁合金與E級鋼連接在一起。沿著焊縫方向取彎曲試樣,可彎曲至90°,最大拉伸強度為229MPa。試件如下圖所示。


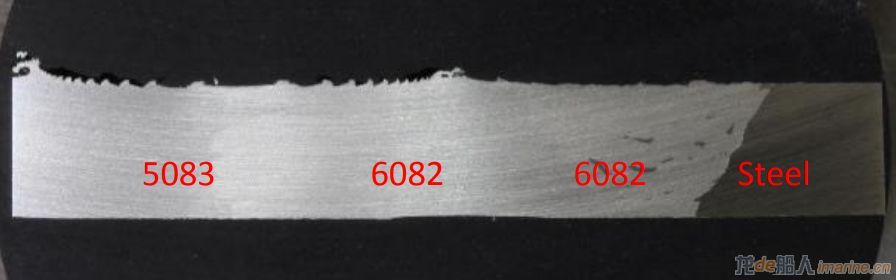
圖5 5083-6082-E級鋼焊接接頭宏觀形貌、彎曲試件、斷面形貌圖
3 結論
(1)試驗結果初步表明,5083鋁合金和鋼的焊接工藝對攪拌頭的位置比較敏感,可能與這兩種材料之間的兼容性有關,現階段通過改變主要焊接參數,很難直接在這兩種材料間制作出強度高的攪拌摩擦焊焊縫。
(2)通過引入6082中間層可以勉強解決上述兩種材料的連接問題,但是該中間層引入可能會導致潛在的腐蝕方面問題。
“俄亥俄”級是美國第四代戰略導彈核潛艇,也是迄今各國海軍中最先進的戰略核潛艇,一艘“俄亥俄”級裝載24枚“三叉戟-I”C4或“三叉戟Ⅱ”D5型潛射彈道導彈,導彈艙作為戰略導彈核潛艇的關鍵結構且是先行開工建造的結構,美國在“俄亥俄”級彈艙上采用的建造工藝值得我們學習和研究。
本文根據《美國海軍潛艇設計特點及質量控制》(趙大勛、李國興,2000)一書中關于“俄亥俄”級核潛艇的資料,以及美國海軍研究辦公室“最佳制造實踐項目”(BMP)評審組在1999年對電船公司在核潛艇建造貫徹BMP的實踐成果的報告等材料,由上海船舶工藝研究所劉晗整理。
二、“俄亥俄”級核潛艇導彈艙基本情況
“俄亥俄”級核潛艇的導彈艙由24個垂直導彈發射筒分兩排布置,導彈發射筒的長度略大T耐壓艇體的直徑(12.8m),發射筒突出在耐壓艇體之上約0.76米,這是因為導彈發射筒的設計原本是考慮裝載長度為13,41米、直徑為2.11米~2.16米的“三叉戟-II”(D5)型導彈,(但是在從首艇SSBN726“俄亥俄”號到SSBN733“內華達”號實際裝載的是“三叉戟Ⅰ”C4型,長度為10.39米,直徑為1.88米。)因此潛艇的上層建筑有一段呈平臺形狀的結構來覆蓋24個導彈發射筒。
 圖1 “俄亥俄”級核潛艇內部布置概要
圖1 “俄亥俄”級核潛艇內部布置概要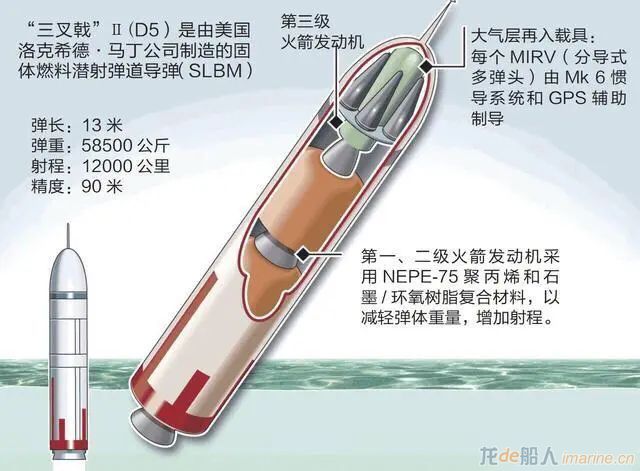
圖2 “三叉戟-II” (D5) 潛射彈道導彈
三、核潛艇肋骨和殼圈自動化裝配系統(AFC)
“俄亥俄”級核潛艇由通用電船公司建造,電船公司的匡塞特角潛艇建造廠與格羅頓分廠前后銜接完成 “俄亥俄”級建造。
匡塞特角潛艇建造廠的廠房內所從事的工作內容是鋼材加工處理、殼圈成形、電氣、鈑金加工、結構和管件組裝以及分部件結構的組裝等;潛艇圓柱形分段在匡塞特角建造廠加工制造好之后,3段圓柱形殼體分段被裝載到一艘駁船上運往格羅頓分廠,駁船運送一次的行程為50英里,用時6個半小時。在格羅頓廠區的2號跨區繼續進行加工制造,這里所進行的安裝被稱為“Final installation”(最后的安裝)。

圖3 通用電船公司匡塞特角廠區
建造高質量、具有成本效益的潛艇的一個關鍵要素是耐壓肋骨和殼圈的制造和組裝。過去,匡塞特角建造廠通過在零件上留出余量來制造這些組件,然后進行余量切割和銑邊以適應組裝。每個組件都需要根輻條式的專用固定裝置、臨時附件、墊片和許多液壓千斤頂。如果任何操作涉及轉動部件,則還需要10到 15人的索具組。總的來說,這種方法成本高、時間長、勞動強度大,并且需要付出很大的努力才能達到所需的質量。
1979 年,電船公司匡塞特角建造廠與瑞士維沃伊工程公司一起開發了肋骨和殼圈自動化裝配系統 (AFC),來制造和組裝這些組件。
AFC系統由四種機械化夾具類型(A、B、C、D)和相關支持設備組成:
- A型夾具專為制造肋骨而設計;
- B 型夾具設計用于制造殼板和殼圈;
- C型夾具設計用于肋骨套裝殼圈;
- D型夾具設計用于兩個殼圈的對接裝配;
- 可以調整所有固定裝置以適應從32英尺到42英尺的殼圈和肋骨直徑。
根據匡塞特角建造廠1980年12月情況介紹,當時該廠已配備10臺肋骨專用加工制造裝置、8臺艇體殼板加工制造裝置、12臺肋骨套裝殼圈設備和3臺殼圈對接設備。首先根據結構部件的生產要求選擇相對應的夾具,接下來,通過液壓系統驅動將部件固定到位,對部件點焊并進行尺寸檢查,尺寸精度符合要求就可以進行焊接。
該夾具包含所有必需設施(如照明、預熱、電源)和支持設備(如升降機、工作平臺),并且可以處理多種焊接工藝,例如機械化、半自動和自動化的氣體金屬電弧脈沖焊、埋弧焊和保護金屬電弧焊。夾具還具備可轉動零件的機構,可改變焊接和工作位置。

圖4 匡塞特角廠區的肋骨和殼圈的自動化裝配系統 (AFC)
AFC 系統使匡塞特角建造廠在某些情況下能夠將其生產時間減少70%以上,因此該顯著降低了成本,提升了生產進度,并提高了所有相關零件的尺寸質量。
四、”只留一道焊縫”—360°殼圈成形技術
- 通過新工具和新技術,匡塞特角建造廠實現了對一塊厚板成形加工出 360°的殼圈,最大程度減少了焊接量。
過去,殼圈是通過將兩個 180° 的殼板焊接形成的,該過程包括準備殼板銑邊、制作四個坡口、焊接兩條接縫,檢查焊縫質量。兩塊殼板焊接比一塊殼板焊接成本更高,因為兩塊殼板邊緣都需要確保余量以進行預彎曲。兩塊殼板裝配的難度大,并且焊縫根部經常會出現較大間隙,這導致了額外的補焊和較大的容差。
- 通過用單塊厚板制造殼圈,匡塞特角建造廠最大化了 360° 成型過程。
該過程涉及制造特殊的窗模,以便材料可以壓制成型為殼圈,因此,制作殼圈只需要焊接一個焊縫。電船公司的設計和制造工程師還共同努力確認了其他可以由單個厚板成形加工的耐壓結構件。
- 通過最大化 360° 成型過程,匡塞特角建造廠改進了其殼圈的尺寸質量(例如,圓度、垂直度、周長)。
這種方法還減少了預彎帶來的板材額外消耗,減少了銑邊、裝配、焊接接頭和焊接量,從而降低了成本。

圖5 匡塞特角建造廠的厚板輥彎成型設備
關于“俄亥俄”級的替代型——“哥倫比亞”級核潛艇耐壓殼圈是否也采用了360° 殼圈成型工藝,目前尚無公開資料。
但是根據美國“國家造船研究計劃”(NSRP)2021年3月的一項ManTech研究——“‘弗吉尼亞’級與‘哥倫比亞’級潛艇用鋼板數控成型”(項目編號S2784)所公開的成果顯示,該項目對目前業界的各類數控彎板機進行潛艇用鋼板輥彎試驗,試驗結果由電船公司相關人員進行鑒定評比,最終選出三種數控彎板設備可滿足弗吉尼亞級垂發模塊和哥倫比亞級潛艇平臺(Columbia Class Submarine platforms)的制造要求。其設備進行了對鋼板360°輥彎工藝(如下圖所示),目的也是為了減少焊縫和焊接及矯正作業量,而電船公司也在籌措資金準備近期購買有關設備,并在廠區安排專用場地。

圖6 ManTech”S2784項目”中,對潛艇用鋼板進行360°數控輥彎成型試驗
隨著該項工藝更加成熟和廠區引進數控彎板設備,未來的“哥倫比亞”級核潛艇耐壓殼圈建造中較大概率采用一塊厚板360°成形加工工藝。
五、小結
1、美國在“俄亥俄”級核潛艇上開始采用模塊化建造工藝,匡塞特角工廠在潛艇分段完成結構建造后,通過自動化車間對分段進行舾裝,再將分段運往格羅頓分廠進行總組和“最后的安裝”;根據目前掌握的資料可以推斷,美國在“俄亥俄”級核潛艇的彈艙建造遵循的流程為耐壓結構建造→彈艙舾裝→彈艙裝入指定位置上的艇體分段,大概率采用了在耐壓結構上開孔再插裝彈筒的工藝。
2、肋骨和殼圈自動化裝配系統以及殼圈360°成型技術在“俄亥俄”級核潛艇的耐壓結構建造中發揮出降本增效的作用,為應對“哥倫比亞”級核潛艇的建造需要,電船公司與2010年前后對匡塞特角工廠的肋骨和殼圈自動化裝配系統進行了翻新整修;此外,根據目前掌握的資料,未來在“哥倫比亞”級上有較大概率會采用一塊厚板360°成型技術來制造殼圈。
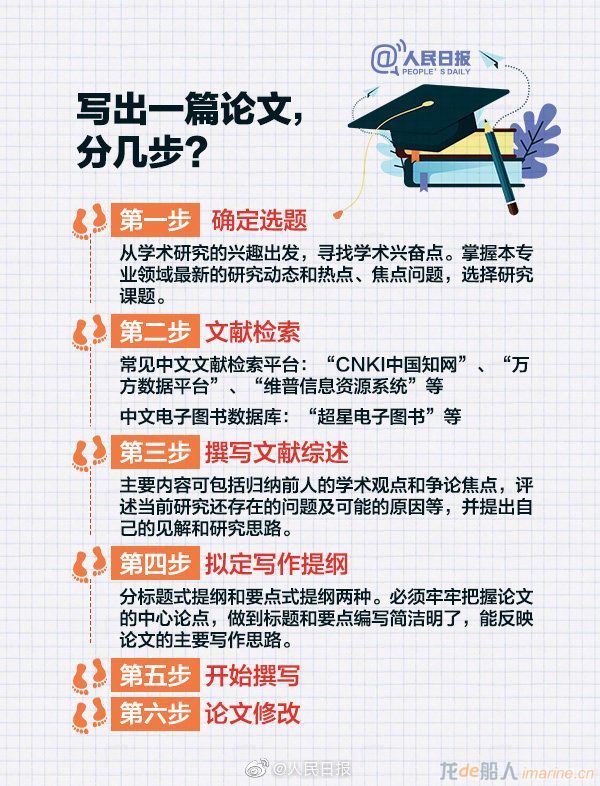
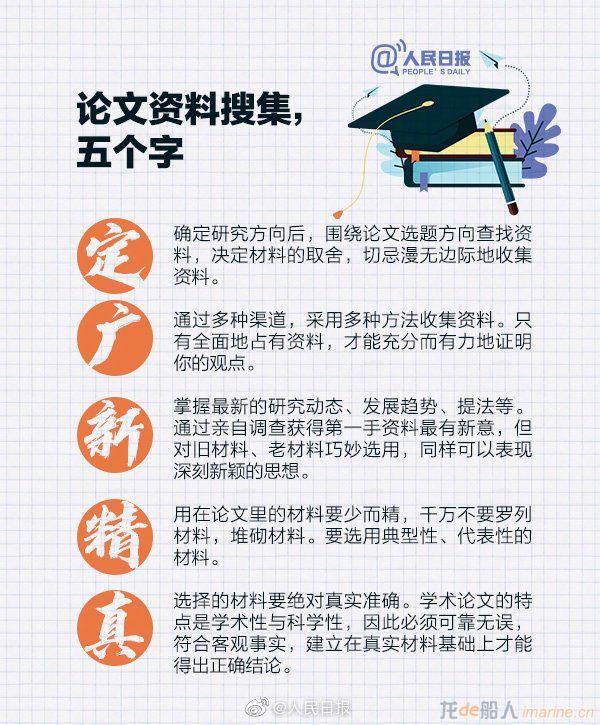
還在為寫論文徹夜難眠嗎?
還在為寫論文掉發禿頭嗎?
干貨上架!
如何寫出一篇高質量論文的秘籍在此!
趕緊一起學一下吧!




生命周期是指某一產品(或服務)從取得原材料,經生產、使用直至廢棄的整個過程,即從搖籃到墳墓的過程。生命周期評估(Life Cycle Assessment,簡稱LCA),是一項自60年代即開始發展的重要環境管理工具,通過估算與產品生命周期相關的環境因素,例如污染氣體的排放、自然資源的開采和廢物的產生,衡量對人類健康和環境的影響。
生命周期評估起源于60年代,到90年代才建立起科學的生命周期評估方法。國際標準化組織(ISO)發布了國際標準ISO 14040《環境管理—生命周期評估—原則及框架》及ISO 14044《環境管理—生命周期評估—要求及指南》,系統性地闡述了生命周期評估的結構。
ISO 標準作為幫助研究人員開展生命周期評估的指南,基本上將生命周期評估工作分為四個階段: (1) 定義目標和范圍; (2) 生命周期清單; (3) 生命周期影響評估; (4) 解釋。
目前,生命周期評估主要用于以下方面: (1)評估產品可能對環境造成的影響,以便為該產品生成可持續性指標并為環境監測奠定堅實的基礎; (2)從環境角度識別改進產品的機會; (3)作為行業、政府或非政府組織等決策者制定戰略規劃的基礎。
二、船用燃料生命周期評估
在全球氣候變化背景下,船舶排放的相關問題一直以來都是航運界高度關注的問題。
據歐盟2020年的研究數據顯示國際航運的CO2 排放量約占世界總排放量的2-3%,由于國際貿易量的增加,預計到 2050 年,CO2排放量將比2008年增加90%至130%。
2018年,國際海事組織(IMO) 設定了減少航運業溫室氣體排放的目標。目標包括到 2050年將國際航運的溫室氣體排放量與2008年的水平相比至少減少50%。為此,IMO正在討論短期和中長期措施,包括提高船舶能效和開發零/低碳的替代燃料。
船舶使用的化石燃料在其生產鏈中是通過高能耗過程生產的。例如,為滿足市場要求,石油精煉需要大量的熱量來分離蒸餾、裂解和餾分等。煉油廠內的絕大多數生產過程都是熱過程,這會導致高溫室氣體排放。因此,需要考慮燃料的整個生產過程,以確定其利用是否為零/低碳排放。在這種情況下,基于生命周期評估的指標可以成為比較替代燃料生產過程中溫室氣體排放的有效工具。
一種考慮化石燃料生產鏈從提取到最終用于發動機過程的方法被稱為“從油井到航跡(well-to-wake)”。 例如,就生物燃料而言,等效方法是“田間到油箱(field-to-tank)”——即從土地使用到加油油箱,見圖1。
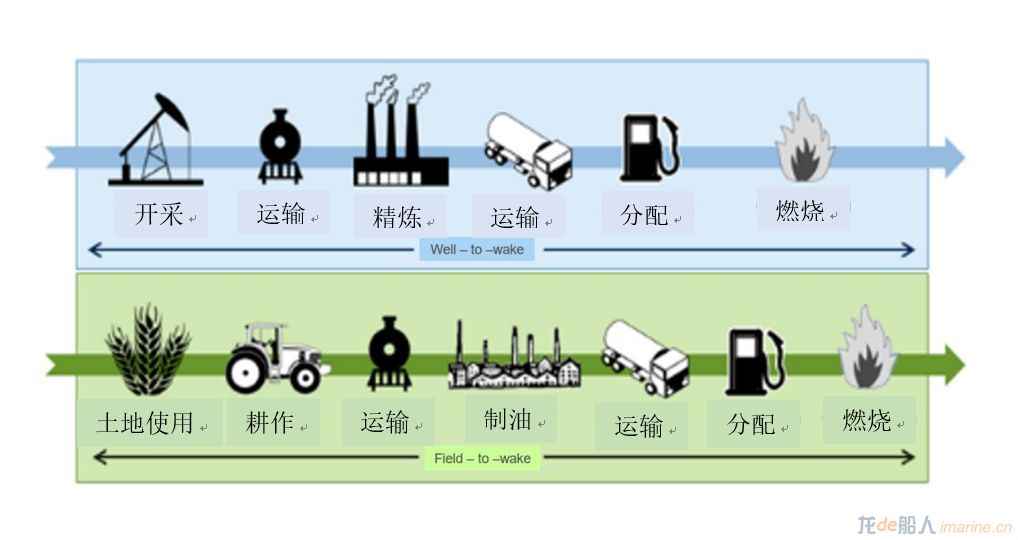
圖1 燃料全生命周期
對于生物燃料,其最終燃燒過程中排放的 CO2相當于生物質生長階段吸收的 CO2。因此,如果未對替代燃料開展生命周期評估,則有可能用另一種在最終使用期間排放較少但在其整個生命周期時更高排放的燃料替代了當前的燃料。最終結果仍是全球溫室氣體排放量增加,這顯然與IMO設定的2050年脫碳目標背道而馳。
燃料溫室氣體排放的全生命周期評估方法是指對某一種燃料(包括傳統燃料和替代燃料)從開采、生產、存儲、運輸、分配直至船上燃料等,整個過程進行溫室氣體排放評估的方法。評估傳統燃料(石油和柴油)和可能的替代燃料產生的生命周期排放,以便比較每種燃料如何導致空氣污染和氣候變化。
三、IMO船用燃料生命周期溫室氣體和碳強度導則制定進展
使用諸如甲醇、氫、氨及生物燃料等替代燃料是IMO溫室氣體減排初步戰略中列入的中長期措施之一,也是實現國際航運零碳轉型的重要途徑。由于這些燃料的原料和生產工藝與傳統燃料不同,是否有必要及采用何種方法從全生命周期尺度評估這些燃料的溫室氣體排放,進而為船用替代燃料的選擇和船舶溫室氣體排放核算提供依據,是IMO亟待明確和解決的問題。
IMO目前正在制定船用燃料生命周期溫室氣體和碳強度導則(以下簡稱“LCA導則”)。LCA導則的制定將重新定義船用燃料排放的核算標準和燃料的生產、運輸、分配等環節的排放核算,進而影響船舶燃料的選擇和能源產業的發展。
今年9月中旬召開的IMO溫室氣體減排會間工作組第9次會議對LCA導則的適用范圍、一般原則和評估方法進行了初步討論,并就LCA導則制定形成了以下共識: (1)排放范圍:現階段,LCA導則的范圍僅限于二氧化碳(CO2)、甲烷(CH4)和氧化亞氮(N2O)等三種溫室氣體;未來在適當的時候將加入黑碳及其它短期氣候污染物。 (2)全球變暖潛力(GWP):使用100年全球變暖潛力(GWP100);邀請成員國和國際組織就增加GWP20的影響提出建議,進行比較。 (3)核算原則:遵循政府間氣候變化專門委員會(IPCC)制定的溫室氣體排放核算原則。 (4)可持續性標準:考慮在LCA導則第1部分(總則)中納入可持續標準。
會議綜合各方意見形成了一份基礎文件,留待后續會議繼續制定LCA導則的具體章節內容,包括可持續標準和認證標準等。